
ж–°иғҪжәҗжұҪиҪҰз”өеӯҗжҺ§еҲ¶зі»з»ҹзҡ„еӣӣеӨ§зү№еҫҒ
2016-11-04
1пјҺзӣ®зҡ„жҖ§
д»»дҪ•ж–°иғҪжәҗжұҪиҪҰз”өеӯҗжҺ§еҲ¶зі»з»ҹзҡ„зӣ®зҡ„йғҪжҳҜдёәдәҶи§ЈеҶідёҺжұҪиҪҰеҠҹиғҪиҰҒжұӮжңүе…ізҡ„й—®йўҳпјҢиҖҢиҝҷдәӣй—®йўҳд»…дҫқйқ йҖҡеёёзҡ„жңәжў°зі»з»ҹжҳҜйҡҫд»Ҙи§ЈеҶізҡ„гҖӮдҫӢеҰӮABSжҳҜдёәдәҶдҝқиҜҒиҪҰиҫҶеңЁжҳ“ж»‘и·ҜйқўдёҠиЎҢ驶时зҡ„е®үе…ЁжҖ§пјӣжӮ¬жһ¶жҺ§еҲ¶з”ЁжқҘж”№е–„ж–°иғҪжәҗжұҪиҪҰзҡ„е№ійЎәжҖ§гҖҒж“ҚзәөжҖ§е’ҢзЁіе®ҡжҖ§пјӣиҖҢеҠЁеҠӣиҪ¬еҗ‘зҡ„зӣ®зҡ„жҳҜдёәдәҶж”№е–„еҒңиҪҰжҲ–дҪҺйҖҹй©ҫ驶时зҡ„иҪ¬еҗ‘еҠӣд»ҘеҸҠдҝқиҜҒеңЁй«ҳйҖҹиЎҢ驶时жңүи·Ҝж„ҹгҖӮ
жҖ»зҡ„жқҘиҜҙпјҢиҪҰиҫҶз”өеӯҗжҺ§еҲ¶зі»з»ҹдё»иҰҒжҳҜдёәдәҶж”№е–„еҰӮдёӢдёҖдәӣеҹәжң¬еҠҹиғҪпјҡ
(1)ж”№е–„д№ҳеқҗиҲ’йҖӮжҖ§В В иүҜеҘҪзҡ„д№ҳеқҗиҲ’йҖӮжҖ§еә”иҜҘжҳҜиҪҰиҫҶеңЁд»»дҪ•и·ҜйқўиЎҢ驶时пјҢж— и®әжі•еҗ‘е’Ңдҫ§еҗ‘иҝҗеҠЁпјҺйў з°ёе’ҢеҶІеҮ»йғҪиҫғе°ҸпјҢзҗҶжғізҡ„жғ…еҶөжҳҜеёҢжңӣиҺ·еҫ—еғҸд№ҳеқҗе–·ж°”ејҸе®ўжңәеңЁеӨ©з©әдёӯйЈһиЎҢдёҖж ·иҲ’йҖӮгҖӮ
(2)иҪҰиҫҶиЎҢ驶时зҡ„е§ҝжҖҒжҺ§еҲ¶В В жҺ§еҲ¶иҪҰиҫҶеңЁиҪ¬еҗ‘гҖҒеҲ¶еҠЁе’ҢеҠ йҖҹж—¶зҡ„дҫ§еҖҫгҖҒзәөеҖҫзӯүиҝҗеҠЁпјҺд»ҘдҝқиҜҒй©ҫ驶е‘ҳжңүиҲ’йҖӮзҡ„иҪҰиҫҶж°ҙе№ідҪҚзҪ®гҖӮ
(3)дҝқиҜҒжңүй«ҳзҡ„ж“ҚзәөжҖ§е’ҢзЁіе®ҡжҖ§В В дҫқйқ з”өеӯҗжҺ§еҲ¶зі»з»ҹпјҢиҪҰиҫҶиғҪеҜ№й©ҫ驶е‘ҳзҡ„ж“ҚзәөеҸҠж—¶дёҪжӯЈзЎ®ең°з»ҷдәҲе“Қеә”пјҢж— и®әеңЁдҪ•з§ҚйҖҹеәҰдёӢйғҪиғҪдҝқиҜҒиҪҰиҫҶзҡ„ж“ҚзәөжҖ§е’ҢзЁіе®ҡжҖ§пјҡеҸҰеӨ–пјҺиҪҰиҫҶеә”дёҚеҸ—дҫ§еҗ‘йЈҺжҲ–и·ҜйқўдёҚе№іеәҰзҡ„е№Іжү°гҖӮ
(4)жҸҗй«ҳиЎҢ驶иғҪеҠӣжһҒйҷҗВ В жұҪиҪҰз”өеӯҗжҺ§еҲ¶зі»з»ҹеә”еңЁд»»дҪ•и·ҜйқўпјҲuпјҢдёҚе№іеәҰпјүе’Ңд»»дҪ•иЎҢ驶е·ҘеҶөпјҲеҠ йҖҹгҖҒеҲ¶еҠЁе’ҢиҪ¬еҗ‘пјүдёӢе®һзҺ°еӨ§зҡ„иҪ®иғҺдёҺи·Ҝйқўй—ҙзҡ„зүөеј•еҠӣпјҺ
(5)иҮӘйҖӮеә”ж“Қзәөзі»з»ҹВ В еҪ“дҪңз”ЁеңЁиҪҰиҫҶдёҠзҡ„жғҜжҖ§еҠӣи¶…иҝҮиҪ®иғҺдёҺи·Ҝйқўй—ҙзҡ„зүөеј•еҠӣжһҒйҷҗж—¶пјҢжҺ§еҲ¶зі»з»ҹеә”иғҪиҮӘеҠЁең°з»ҷдәҲиҪ¬еҗ‘гҖҒеҲ¶еҠЁжҲ–еҠ йҖҹпјҢд»ҘйҒҝе…ҚиҪҰиҫҶиҝӣе…ҘеҚұйҷ©зҠ¶жҖҒгҖӮ
2пјҺзӣёе…іжҖ§
ж–°иғҪжәҗжұҪиҪҰдёҠеҗ„з§Қз”өеӯҗжҺ§еҲ¶зі»з»ҹеҫҖеҫҖжҳҜзӣёдә’е…іиҒ”зҡ„пјҢеҰӮжһңдёҚиҖғиҷ‘иҝҷз§Қзӣёе…іжҖ§пјҢд»»дёҖжҺ§еҲ¶зі»з»ҹйғҪдјҡеҮәзҺ°йқһжүҖйў„жңҹзҡ„з»“жһңгҖӮдҫӢеҰӮиҪҰиҫҶдёҠзҡ„дё»еҠЁжӮ¬жһ¶пјҢеҰӮжһңдёҚиҖғиҷ‘йҳІж»‘еҲ¶еҠЁзі»з»ҹзҡ„иЎҢдёәпјҢе°ұжңүеҸҜиғҪеңЁжҖҘеҲ№иҪҰж—¶еҜјиҮҙиҪҰиҫҶзҡ„дёҠдёӢиө·дјҸе’Ңзәөеҗ‘ж‘Үж‘ҶгҖӮиҝҷжҳҜеӣ дёәдё»еҠЁжӮ¬жһ¶еҜ№йҳІж»‘еҲ¶еҠЁзі»з»ҹзҡ„жіўеҠЁжҳҜжңүеҸҚе“Қзҡ„гҖӮеҸҲеҰӮдё»еҠЁжӮ¬жһ¶еҸҜд»ҘеҮҸе°ҸиҪҰиҫҶдҫ§еҖҫпјҢеҸҜжҳҜеҚҙз ҙеқҸдәҶеӣӣиҪ®иҪ¬еҗ‘зі»з»ҹ(4WS)зҡ„жЁӘж‘Ҷе“Қеә”гҖӮдёҺжӯӨеҗҢж—¶пјҢиӢҘдҫқйқ 4WSж”№е–„жЁӘж‘Ҷе“Қеә”пјҢеҲҷдё»еҠЁжӮ¬жһ¶зҡ„дҫ§еҖҫ收ж•ӣж•ҲжһңеҮҸејұгҖӮ
3пјҺеұӮж¬ЎжҖ§
ж–°иғҪжәҗжұҪиҪҰз”өеӯҗжҺ§еҲ¶зі»з»ҹжҳҜжңүеұӮж¬Ўзҡ„пјҢдёҖиҲ¬еҸҜд»ҘеҲҶжҲҗдёүдёӘеұӮж¬ЎпјҢеҰӮеӣҫ1вҖ”5жүҖзӨәгҖӮеұӮж¬ЎжҳҜиҪҰиҫҶз»јеҗҲжҺ§еҲ¶зі»з»ҹгҖӮ第дәҢеұӮж¬ЎжҳҜеҗ„дёӘеӯҗзі»з»ҹпјҢеҰӮеҲ¶еҠЁжҺ§еҲ¶зі»з»ҹгҖҒиҪ¬еҗ‘жҺ§еҲ¶зі»з»ҹгҖҒжӮ¬жһ¶жҺ§еҲ¶зі»з»ҹе’ҢеҠЁеҠӣдј еҠЁиЈ…зҪ®жҺ§еҲ¶зі»з»ҹзӯүгҖӮдёҖиҫҶиҪҰеүҚеҗҺгҖҒе·ҰеҸіеӣӣдёӘеҲ¶еҠЁиЈ…зҪ®жҲ–еӣӣдёӘжӮ¬жһ¶иЈ…зҪ®зҡ„жҺ§еҲ¶зі»з»ҹеҲҷеұһдәҺ第дёүеұӮж¬ЎгҖӮ
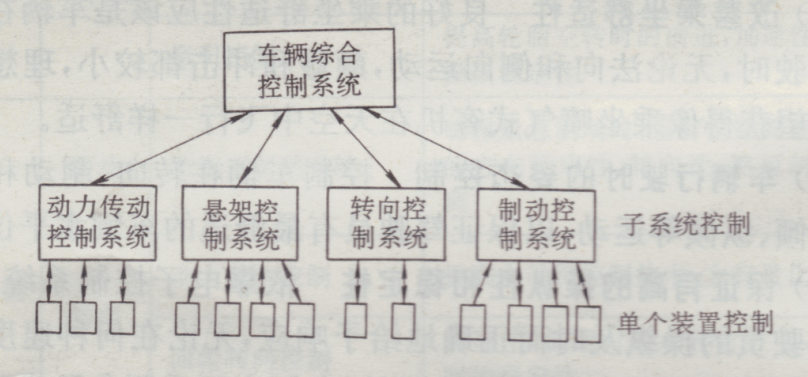
жұҪиҪҰз”өеӯҗжҺ§еҲ¶зі»з»ҹзҡ„дёүдёӘеұӮж¬Ў
зӣ®еүҚйғҪжҠҠдәәдёҖиҪҰдёҖзҺҜеўғзі»з»ҹжҺ§еҲ¶зңӢдҪңдёҖдёӘеҚ•зӢ¬зҡ„жҺ§еҲ¶еұӮж¬ЎпјҢиҝҷж ·е’ҢеүҚйқўдёүдёӘеұӮж¬ЎеҠ еңЁдёҖиө·е°ұжҲҗдәҶеӣӣдёӘеұӮж¬ЎгҖӮ
4пјҺйҡҸжңәжҖ§
з”ұдәҺж–°иғҪжәҗжұҪиҪҰеңЁдёҚеҗҢзҡ„ж°”еҖҷзҺҜеўғе’ҢйҒ“и·ҜжқЎд»¶дёӢиЎҢ驶пјҢиҖҢдё”е®ғзҡ„иЎҢ驶е·ҘеҶөеҸҲжҳҜеҠЁжҖҒеҸҳеҢ–зҡ„пјҢеӣ иҖҢжұҪиҪҰдҪңдёәдёҖдёӘзі»з»ҹпјҢжҳҜеҠЁжҖҒзҡ„гҖҒдёҚзЎ®е®ҡзҡ„жҲ–йҡҸжңәзҡ„гҖӮеҪ“жҹҗдёҖжӮ¬жһ¶жҺ§еҲ¶зі»з»ҹжҳҜдёәзү№е®ҡзҡ„иҪҪиҚ·е·ҘеҶөе’ҢйҒ“и·ҜжқЎд»¶и®ҫи®Ўж—¶пјҢйӮЈд№ҲеңЁеҠЁиҙҹиҚ·е’Ңи·ҜйқўдёҚе№іеәҰеҸҳеҢ–ж—¶пјҢиҜҘжӮ¬жһ¶жҺ§еҲ¶зі»з»ҹе°ұдёҚиғҪдҝқиҜҒиҪҰиҫҶиҺ·еҫ—иүҜеҘҪжҖ§иғҪгҖӮеӣ жӯӨпјҢз”өеҠЁжұҪиҪҰз”өеӯҗжҺ§еҲ¶зі»з»ҹеҝ…йЎ»иғҪйҖӮеә”еӨ–з•ҢжқЎд»¶зҡ„йҡҸжңәеҸҳеҢ–гҖӮ
дёӢдёҖзҜҮпјҡ е…Ёйқўи§ЈиҜ»з”өеҠЁжұҪиҪҰз”өжңәеҹәзЎҖзҹҘиҜҶ





