
зәҜз”өеҠЁжұҪиҪҰз”өжңәй©ұеҠЁзі»з»ҹзҡ„з”өжөҒжҺ§еҲ¶ж–№жі•
2016-04-13
еңЁзәҜз”өеҠЁжұҪиҪҰз”өжңәй©ұеҠЁзі»з»ҹдёӯпјҢиҫ“еҮәз”өжөҒдёҚд»…дёҺиҫ“е…Ҙз”өеҺӢжңүе…іпјҢиҖҢдё”дёҺзі»з»ҹиҙҹиҪҪжңүе…іпјҢеӣ жӯӨпјҢйҮҮз”Ёй—ӯзҺҜPWMж–№жі•жҳҜйқһеёёжңүеҝ…иҰҒзҡ„гҖӮз”өжөҒPWMж–№жі•йҮҮз”Ёй—ӯзҺҜжҺ§еҲ¶з®—жі•пјҢж №жҚ®дј ж„ҹеҷЁдёӯз”өжөҒзҡ„еҸҚйҰҲдҝЎжҒҜпјҢеҜ№йҖҶеҸҳеҷЁиҝӣиЎҢPWMжҺ§еҲ¶гҖӮеңЁдҪҝз”Ёз”өжөҒPWMж–№жі•ж—¶пјҢйңҖиҰҒе°Ҷдј ж„ҹеҷЁжөӢйҮҸзҡ„дёүзӣёз”өжөҒдёҺзі»з»ҹеӨ–зҺҜжҺ§еҲ¶еҷЁдә§з”ҹзҡ„3дёӘеҸӮиҖғз”өжөҒдҝЎеҸ·иҝӣиЎҢжҜ”иҫғгҖӮж №жҚ®жөӢйҮҸдҝЎеҸ·е’ҢеҸӮиҖғдҝЎеҸ·д№Ӣй—ҙзҡ„иҜҜе·®пјҢPWMз®—жі•иҫ“еҮәзӣёеә”зҡ„йҖүйҖҡдҝЎеҸ·гҖӮеҹәдәҺз”өжөҒжҺ§зҡ„PWMж–№жі•д№ҹжңүеҫҲеӨҡпјҢе…¶дёӯж—ўжңүжҜ”иҫғз®ҖеҚ•зҡ„пјҢд№ҹжңүйқһеёёеӨҚжқӮзҡ„гҖӮ
иҝҷдәӣж–№жі•еҢ…жӢ¬ж»һзҺҜз”өжөҒжҺ§еҲ¶жі•гҖҒж–ңеқЎдәӨжҲӘжҺ§еҲ¶жі•д»ҘеҸҠйў„жөӢз”өжөҒжҺ§еҲ¶жі•зӯүгҖӮйў„жөӢз”өжөҒжҺ§еҲ¶жі•жҳҜжҜ”иҫғеӨҚжқӮзҡ„пјҢе®ғж №жҚ®иҙҹиҪҪжқҘиҝӣиЎҢз”өжөҒйў„жөӢгҖӮдёӢйқўе°Ҷз®ҖиҰҒд»Ӣз»ҚдёӨз§ҚзӣёеҜ№з®ҖеҚ•зҡ„з”өжөҒжҺ§еҲ¶ж–№жі•пјҢж»һзҺҜз”өжөҒжҺ§еҲ¶жі•е’Ңж–ңеқЎдәӨжҲӘжҺ§еҲ¶жі•гҖӮ
ж»һзҺҜз”өжөҒжҺ§еҲ¶жі•
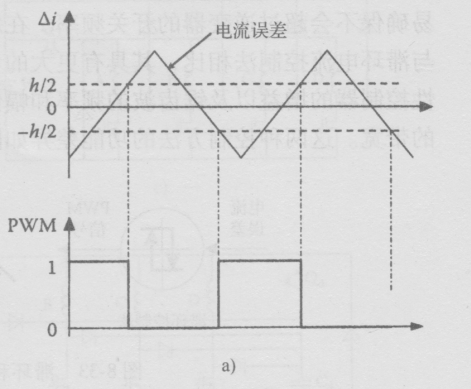
еңЁж»һзҺҜз”өжөҒжҺ§еҲ¶жі•дёӯпјҢжөӢйҮҸз”өжөҒе’ҢеҸӮиҖғз”өжөҒд№Ӣй—ҙзҡ„иҜҜе·®дёҺж»һзҺҜеёҰиҝӣиЎҢжҜ”иҫғпјҢж»һзҺҜеёҰеҰӮеӣҫ8-32aжүҖзӨәгҖӮеҰӮжһңз”өжөҒиҜҜе·®еңЁж»һзҺҜеёҰеҶ…пјҢеҲҷPWMиҫ“еҮәдҝқжҢҒдёҚеҸҳгҖӮеҰӮжһңз”өжөҒиҜҜе·®и¶…еҮәдәҶж»һзҺҜеёҰпјҢPWMдјҡиҫ“еҮәдёҖдёӘеҸҚеҗ‘зҡ„дҪңз”ЁпјҢд»Ҙdi/dtзҡ„жўҜеәҰеҸҳеҢ–гҖӮд»Һж•°еӯҰзҡ„и§’еәҰжқҘи®ІпјҢPWMзҡ„иҫ“еҮәеҸҜд»ҘиЎЁзӨәдёә
еҰӮжһңPWMиҫ“еҮәдҝЎеҸ·дёәвҖң0вҖқпјҢжҢҮзҡ„жҳҜж–ӯејҖжҺ§еҲ¶зӣёзҡ„з”өеҺӢжәҗпјҢдҪҝз”өжөҒиЎ°еҮҸпјӣеҰӮжһңPWMиҫ“еҮәдҝЎеҸ·дёәвҖң1вҖқпјҢжҢҮзҡ„жҳҜй—ӯеҗҲжҺ§еҲ¶зӣёзҡ„з”өеҺӢжәҗпјҢдҪҝз”өжөҒеҸҳеӨ§гҖӮз”өеҺӢдјҡејәеҲ¶з”өжөҒиҝҷж ·еҸҳеҢ–пјҢдҪҝе…¶дҝқжҢҒеңЁж»һзҺҜеҶ…гҖӮ
иҝҷз§ҚжҺ§еҲ¶ж–№жі•зҡ„дјҳзӮ№жҳҜз”өжөҒиҜҜе·®е§Ӣз»ҲдҝқжҢҒеңЁдёҖе®ҡзҡ„еёҰе®ҪеҶ…пјҢиҝҷдёӘеёҰе®Ҫд№ҹжҳҜз”ЁжҲ·дәӢе…ҲзҹҘйҒ“зҡ„гҖӮеңЁж»һзҺҜз”өжөҒжҺ§еҲ¶ж–№жі•дёӯпјҢејҖе…ійў‘зҺҮжҳҜдёҚзҹҘйҒ“зҡ„пјҢиҝҷж ·е°ұдјҡдҪҝеҫ—и®ҫи®Ўж»ӨжіўеҷЁеҸҳеҫ—жҜ”иҫғеӣ°йҡҫгҖӮеҜ№ејҖе…ійў‘зҺҮеә”иҜҘд»”з»ҶиҝӣиЎҢзӣ‘жөӢпјҢд»Ҙе…Қи¶…еҮәйҖҶеҸҳеҷЁзҡ„жһҒйҷҗгҖӮеңЁе®һйҷ…дҪҝз”Ёж—¶пјҢйҖҡеёёдјҡи®ҫе®ҡејҖе…ійў‘зҺҮзҡ„дёҠйҷҗпјҢд»Ҙе…Қи¶…еҮәйҖҶеҸҳеҷЁејҖе…ійў‘зҺҮзҡ„еӨ§жһҒйҷҗгҖӮж»һзҺҜзҡ„еёҰе®ҪйҖҡеёёжҳҜж №жҚ®еҠҹзҺҮеҷЁд»¶зҡ„ејҖе…ійў‘зҺҮжқҘи®ҫи®Ўзҡ„гҖӮеҰӮжһңж»һзҺҜеёҰе®ҪйҖүеҫ—йқһеёёзӘ„пјҢйӮЈд№ҲејҖе…ійў‘зҺҮе°ұйңҖиҰҒйқһеёёй«ҳпјҢеҗҢж—¶дёҚиғҪи¶…еҮәеҠҹзҺҮеҷЁд»¶зҡ„еӨ§ејҖе…ійў‘зҺҮгҖӮеҸҰдёҖж–№йқўпјҢеҰӮжһңеёҰе®ҪжҜ”иҫғе®Ҫзҡ„иҜқпјҢз”өжөҒиҜҜе·®е°ҶдјҡйқһеёёеӨ§гҖӮ
ж»һзҺҜз”өжөҒжҺ§еҲ¶жі•еҸҜд»Ҙеә”з”ЁдәҺдёүзӣёPWMйҖҶеҸҳеҷЁпјҢжҜҸдёҖзӣёйғҪжңүдёҖдёӘPWMжҺ§еҲ¶еҷЁгҖӮеҰӮжһңе®һйҷ…з”өжөҒжҜ”еҸӮиҖғз”өжөҒй«ҳеҮәж»һзҺҜеёҰе®Ҫзҡ„дёҖеҚҠпјҢжЎҘејҸйҖҶеҸҳеҷЁзҡ„дҪҺеҺӢз«Ҝе°Ҷдјҡй—ӯеҗҲпјҢд»ҘеҮҸе°Ҹзӣёз”өжөҒгҖӮдёүзӣёж»һзҺҜжҺ§еҲ¶д№ҹжңүдёҖдёӘйҡҫзӮ№пјҢж №жҚ®ж»һзҺҜжҺ§еҲ¶пјҢеҜ№еҗ„зӣёејҖе…ізҠ¶жҖҒзҡ„иҰҒжұӮеҸҜиғҪдјҡжңүеҶІзӘҒгҖӮеҪ“иҖғиҷ‘дёүзӣёзі»з»ҹж»һзҺҜжҺ§еҲ¶дёҺеҗ„зӣёзӢ¬з«Ӣзҡ„ж»һзҺҜжҺ§еҲ¶д№Ӣй—ҙзҡ„зӣёдә’е…ізі»ж—¶пјҢйҡҫеәҰе°ұжӣҙеӨ§дәҶгҖӮиҝҷдёӘйҡҫзӮ№йҖ жҲҗзҡ„з»“жһңжҳҜз”өжөҒеҸҜиғҪж— жі•дҝқжҢҒеңЁж»һзҺҜеёҰе®ҪеҶ…гҖӮ
дҫӢеҰӮпјҢжңүдёҖдёӘжҢҮд»ӨйңҖиҰҒaзӣёз”өжөҒеўһеҠ пјҢйңҖиҰҒдҪҝз”ЁbзӣёжҲ–иҖ…cзӣёзҡ„дҪҺеҺӢз«ҜдҪңдёәеӣһи·ҜпјҢиҖҢеҰӮжһңжҒ°еңЁжӯӨж—¶bзӣёжҲ–иҖ…cзӣёзҡ„й«ҳеҺӢз«ҜжӯЈеңЁй—ӯеҗҲпјҢиҝҷж ·aзӣёз”өжөҒе°ұж— жі•и·ҹйҡҸжҢҮд»ӨдҪҝз”өжөҒеўһеҠ гҖӮеңЁиҝҷз§Қжғ…еҶөдёӢпјҢaзӣёз”өжөҒзҡ„иҜҜе·®е°ұжңүеҸҜиғҪи¶…еҮәж»һзҺҜзҡ„еёҰе®ҪгҖӮдҪҝз”ЁdqеҸҳжҚўзҗҶи®әпјҢеҸҜд»ҘйҰ–е…Ҳе°Ҷдёүзӣёз”өжөҒеҸҳжҚўдёәдёӨзӣёdqз”өжөҒпјҢ然еҗҺеңЁdqеҸӮиҖғзі»дёӯдҪҝз”Ёж»һзҺҜз”өжөҒжҺ§еҲ¶гҖӮ
ж–ңеқЎдәӨжҲӘжҺ§еҲ¶жі•
жҺ§еҲ¶е®ҡеӯҗз”өжөҒиҝҳжңүеҸҰеӨ–дёҖз§Қж–№жі•пјҢиҝҷз§Қж–№жі•зҡ„жҺ§еҲ¶еҷЁеҹәдәҺеӣәе®ҡйў‘зҺҮзҡ„ж–ңеқЎдҝЎеҸ·пјҢиҖҢдё”ж–ңеқЎдҝЎеҸ·еҶіе®ҡдәҶејҖе…ійў‘зҺҮгҖӮз”өжөҒиҜҜе·®йҰ–е…Ҳдј з»ҷдёҖдёӘзәҝжҖ§жҺ§еҲ¶еҷЁпјҢе…ёеһӢзҡ„зәҝжҖ§жҺ§еҲ¶еҷЁдёәжҜ”дҫӢз§ҜеҲҶ(В PI)еһӢгҖӮзәҝжҖ§жҺ§еҲ¶еҷЁзҡ„иҫ“еҮәз»“жһңдёҺдёҖдёӘй«ҳйў‘й”ҜйҪҝеҪўдёүи§’жіўдҝЎеҸ·зӣёжҜ”иҫғпјҢ然еҗҺиҫ“еҮәPWMејҖе…ідҝЎеҸ·гҖӮеҰӮжһңиҜҜе·®дҝЎеҸ·жҜ”дёүи§’жіўдҝЎеҸ·й«ҳпјҢPWMиҫ“еҮәдҝЎеҸ·дёәвҖң1вҖқпјҢеҗҰеҲҷиҫ“еҮәдҝЎеҸ·дёәвҖң0вҖқпјҢжҺ§еҲ¶иҝҮзЁӢеҰӮеӣҫbжүҖзӨәгҖӮдёәдәҶеҮҸе°Ҹз”өжөҒиҜҜе·®пјҢе®ҡеӯҗз”өеҺӢжҳҜдёҚж–ӯеҸҳеҢ–зҡ„гҖӮеңЁдёүзӣёзі»з»ҹдёӯдҪҝз”Ё3дёӘеҗҢж ·зҡ„жҺ§еҲ¶еҷЁгҖӮ
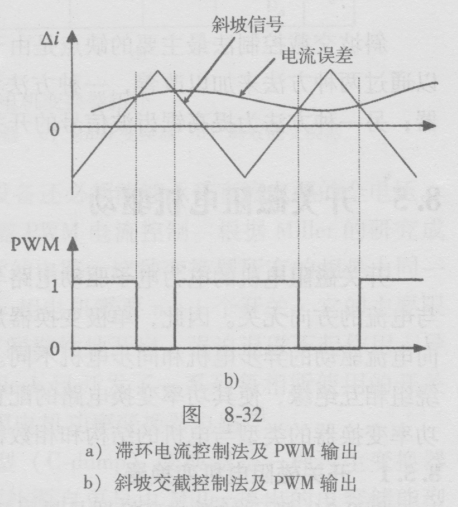
ж–ңеқЎдәӨжҲӘжҺ§еҲ¶жі•ејҖе…ійў‘зҺҮеӣәе®ҡпјҢе…¶йў‘зҺҮз”ұй”ҜйҪҝжіўзҡ„йў‘зҺҮеҶіе®ҡпјҢиҝҷж ·е°ұеҸҜд»ҘеҫҲе®№жҳ“зЎ®дҝқдёҚдјҡи¶…иҝҮйҖҶеҸҳеҷЁзҡ„ејҖе…ійў‘зҺҮгҖӮеңЁж–ңеқЎдәӨжҲӘжҺ§еҲ¶жі•дёӯеҸҜд»Ҙи°ғж•ҙеҫҲеӨҡеҸӮж•°пјҢеӣ жӯӨдёҺж»һзҺҜз”өжөҒжҺ§еҲ¶жі•зӣёжҜ”пјҢе…¶е…·жңүжӣҙеӨ§зҡ„зҒөжҙ»жҖ§гҖӮж–ңеқЎдәӨжҲӘжҺ§еҲ¶жі•зҡ„жҺ§еҲ¶еҸӮж•°еҢ…жӢ¬зәҝжҖ§жҺ§еҲ¶еҷЁзҡ„еўһзӣҠд»ҘеҸҠй”ҜйҪҝжіўзҡ„йў‘зҺҮе’Ңе№…еҖјпјҢиҖҢж»һзҺҜз”өжөҒжҺ§еҲ¶жі•зҡ„жҺ§еҲ¶еҸӮж•°еҸӘжңүж»һзҺҜзҡ„еёҰе®ҪгҖӮиҝҷдёӨз§ҚжҺ§еҲ¶ж–№жі•зҡ„еҠҹиғҪе·®ејӮеҰӮеӣҫжүҖзӨәгҖӮ
ж»һзҺҜе’Ңж–ңеқЎдәӨжҲӘжҺ§еҲ¶жҠҖжңҜ
ж–ңеқЎдәӨжҲӘжҺ§еҲ¶жі•дё»иҰҒзҡ„зјәзӮ№жҳҜз”ұдәҺдј иҫ“延иҝҹдҪҝеҫ—е“Қеә”ж—¶й—ҙеҸҳй•ҝгҖӮиҝҷз§Қжғ…еҶөеҸҜд»ҘйҖҡиҝҮдёӨз§Қж–№жі•жқҘеҠ д»Ҙж”№е–„пјҢдёҖз§Қж–№жі•дёәз”ЁдёҖдёӘй«ҳеўһзӣҠзҡ„жҜ”дҫӢжҺ§еҲ¶еҷЁжӣҝжҚўPIжҺ§еҲ¶еҷЁпјӣеҸҰдёҖз§Қж–№жі•дёәжҸҗй«ҳй”ҜйҪҝжіўдҝЎеҸ·зҡ„ејҖе…ійў‘зҺҮгҖӮ
дёӢдёҖзҜҮпјҡ дәӨжөҒз”өеҠЁжңәжҺ§еҲ¶еҷЁзҡ„еҺҹзҗҶеҸҠзү№зӮ№





